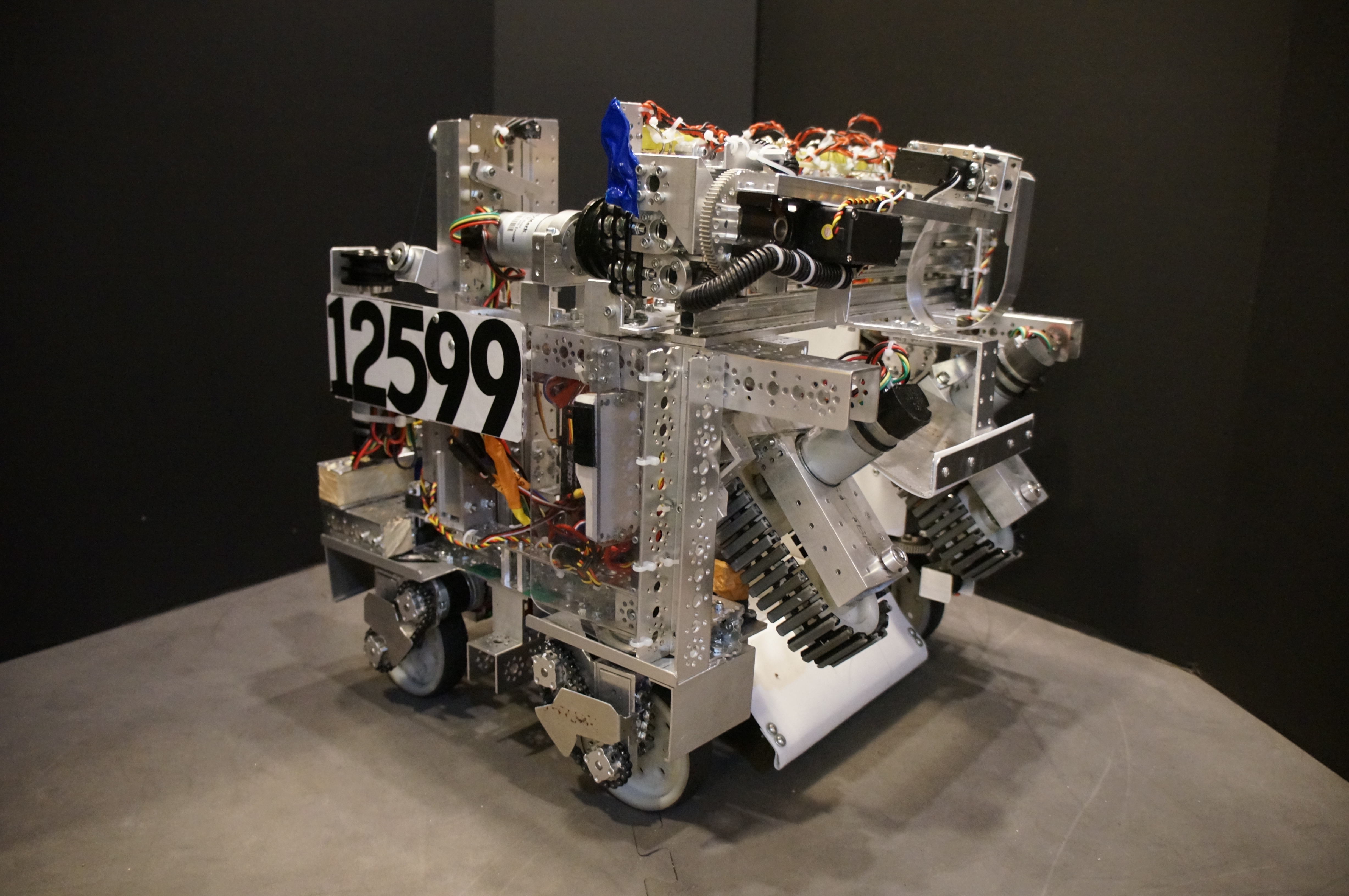
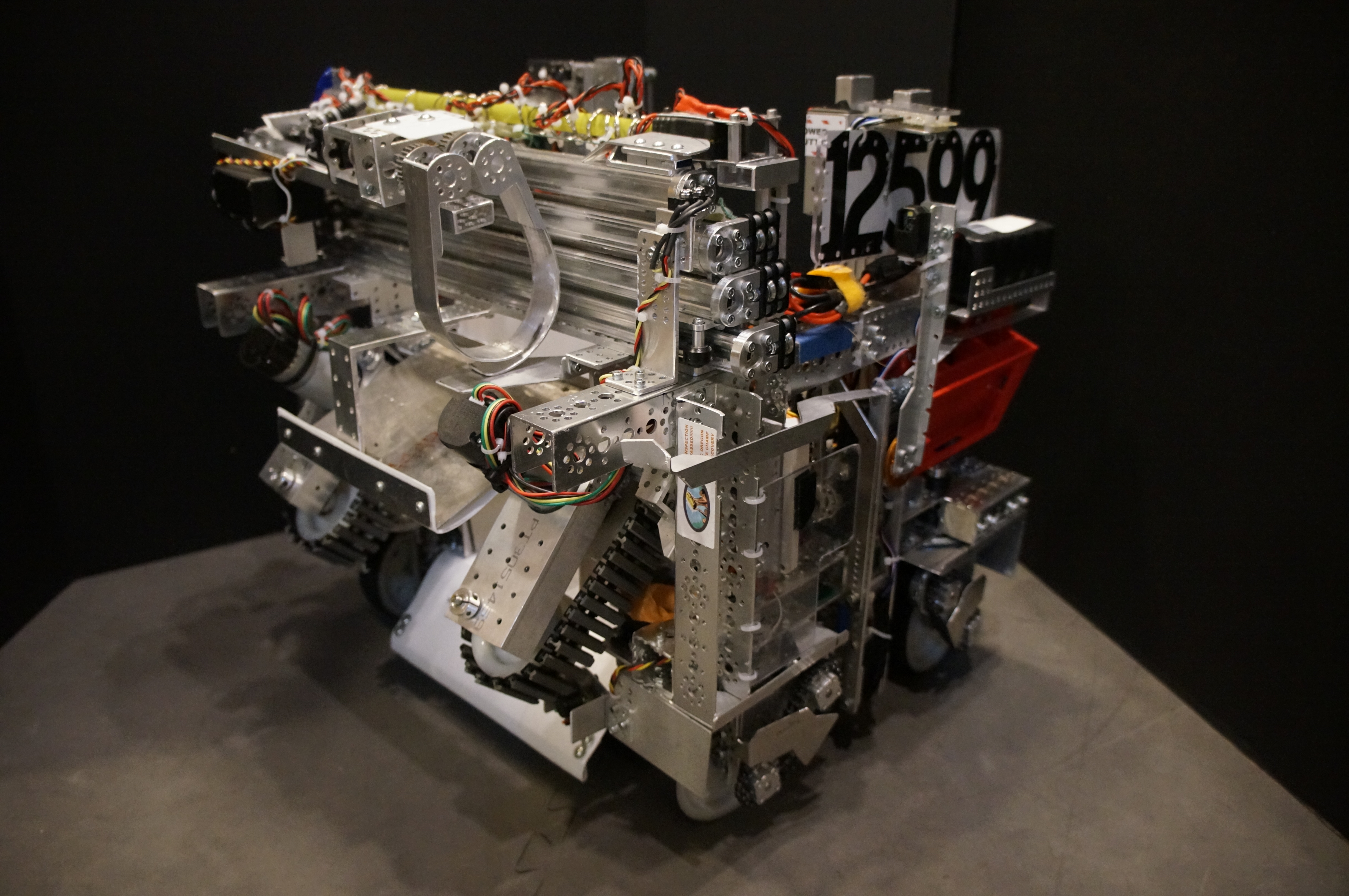
El Tigre is our second robot of this season. We noticed that the intake robots were extremely efficient in this game. We wanted to have a compromise: keep our innovative swerve drive while making room for the intake. The only way we could do this is by having an unorthodox intake system.
Most of these robots used compliant wheels, but we decided to take a different approach, using our tank treads to graph the glyphs. This was raised up using a ramp covered in Teflon and brought up to our flipper’s claw, which gripped the glyphs prior to flipping them out for scoring. This was all topped off with a unique bottom scoring relic arm, which consistently scores a standing relic.
Relic Arm
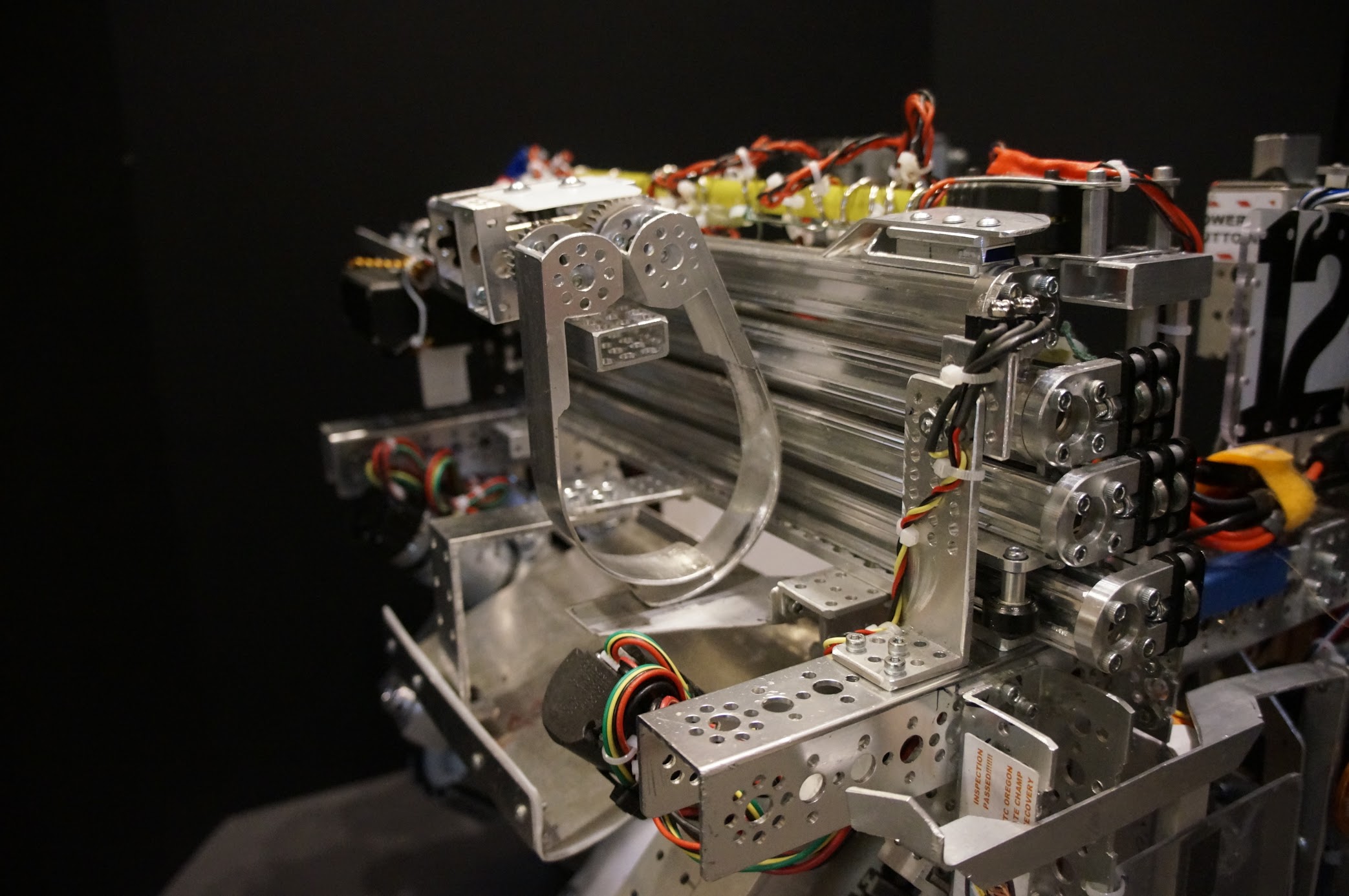
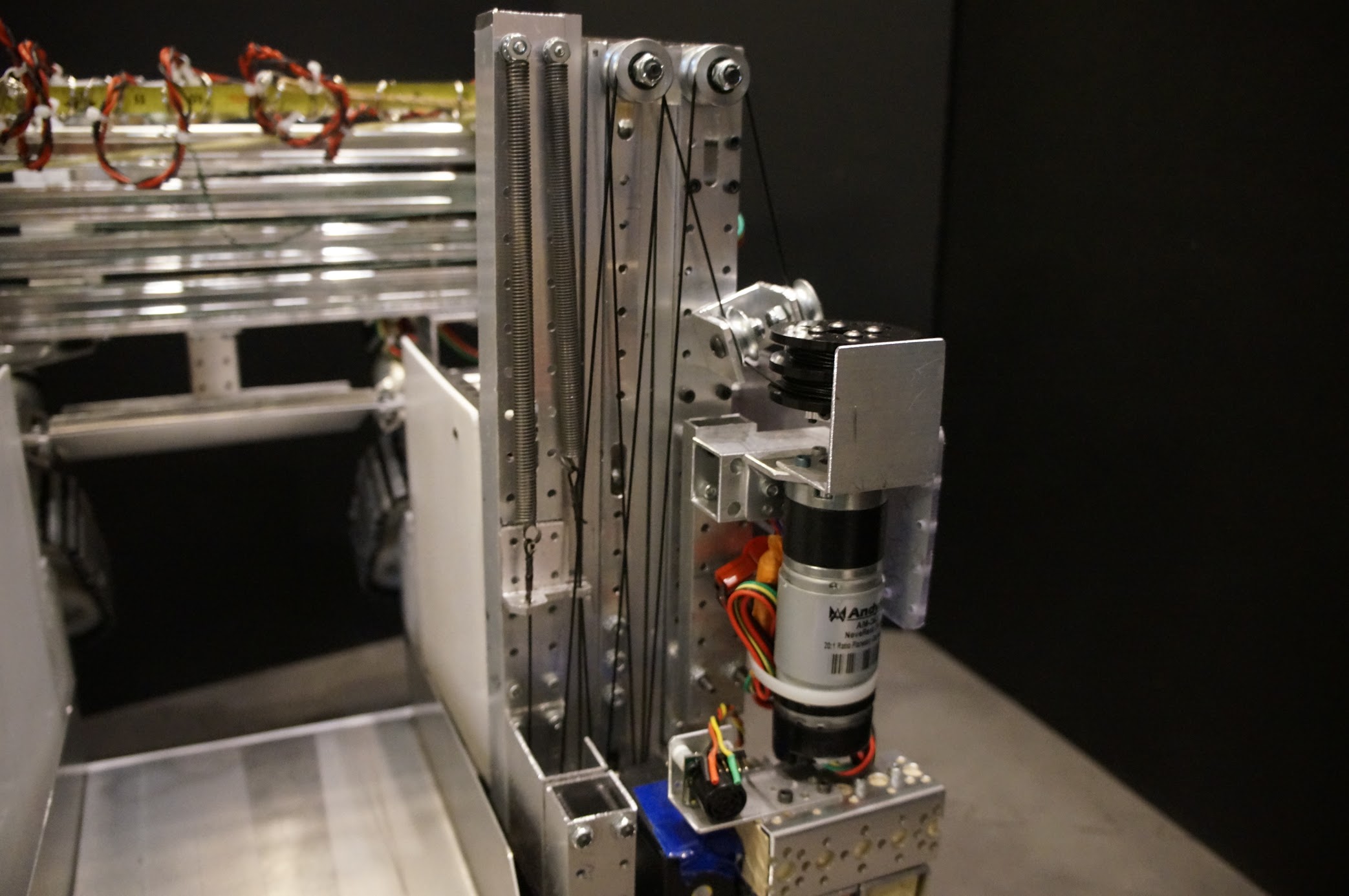
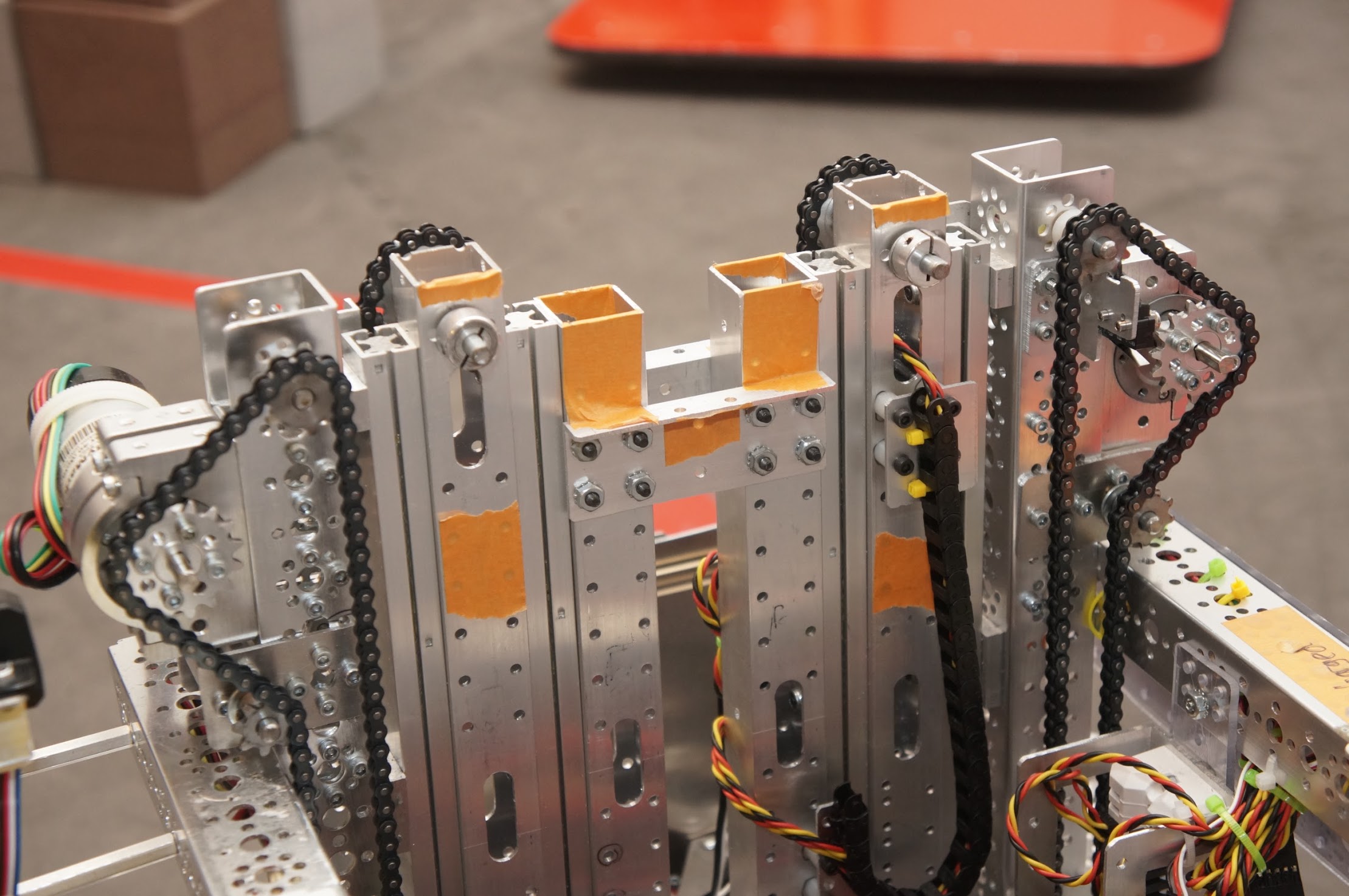
Slide System
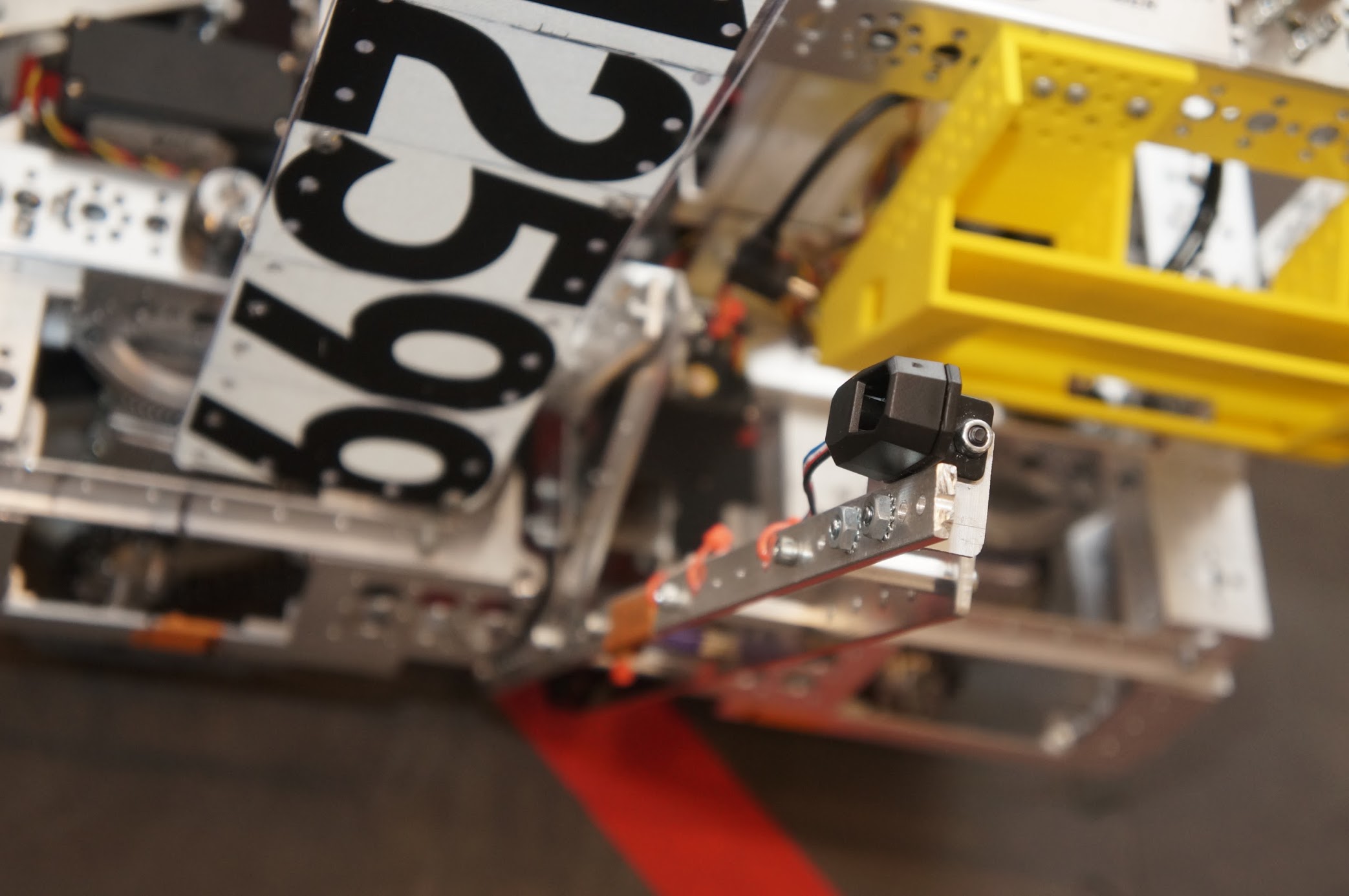
Jewel Probe
Our jewel arm had a trident shape bracing to guide the jewels away from the Cryptobox and to prevent it from reaching under the balancing stone. All of this when put together brought together an extremely compact and capable robot.
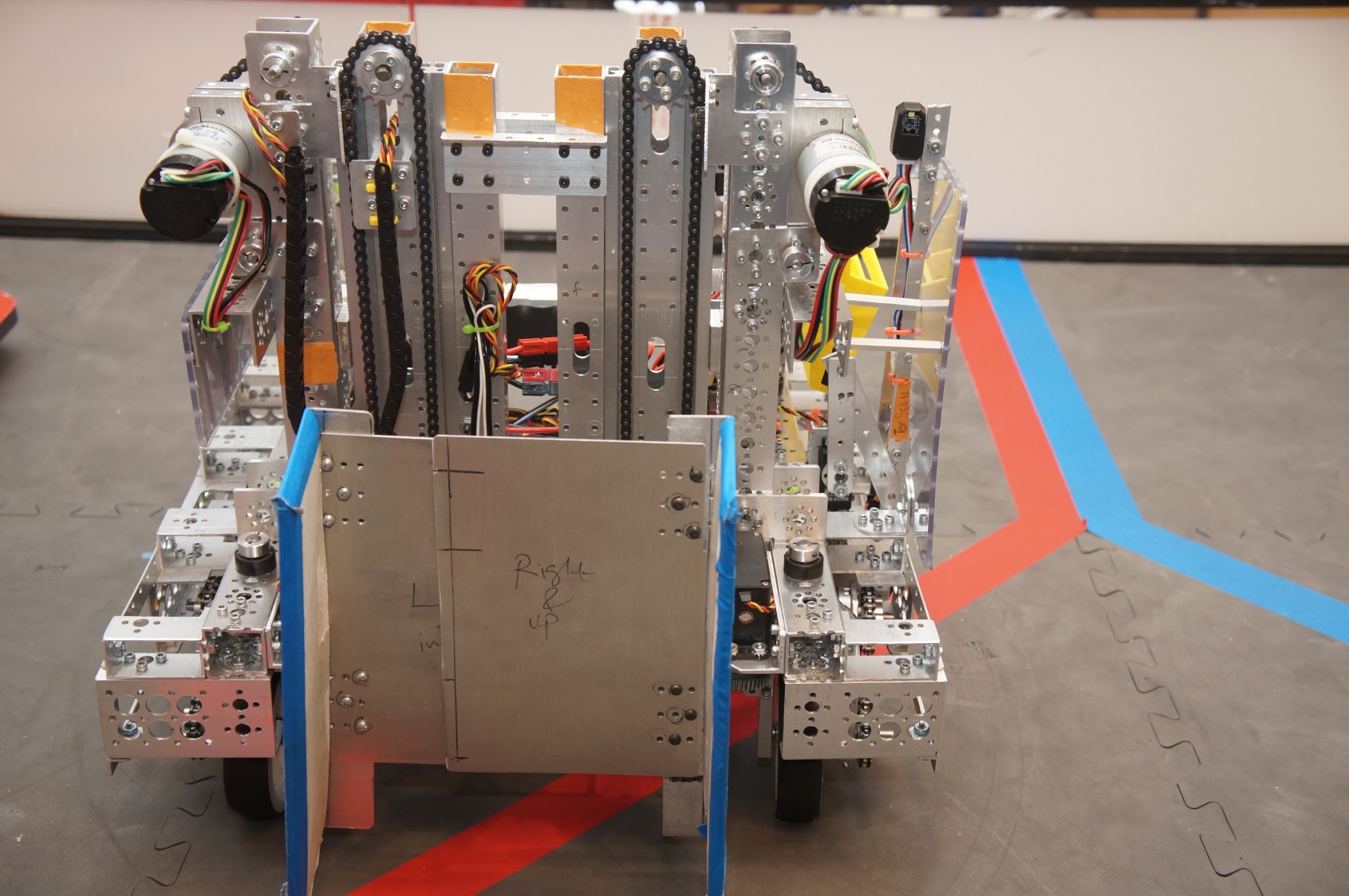
Robot Reveal
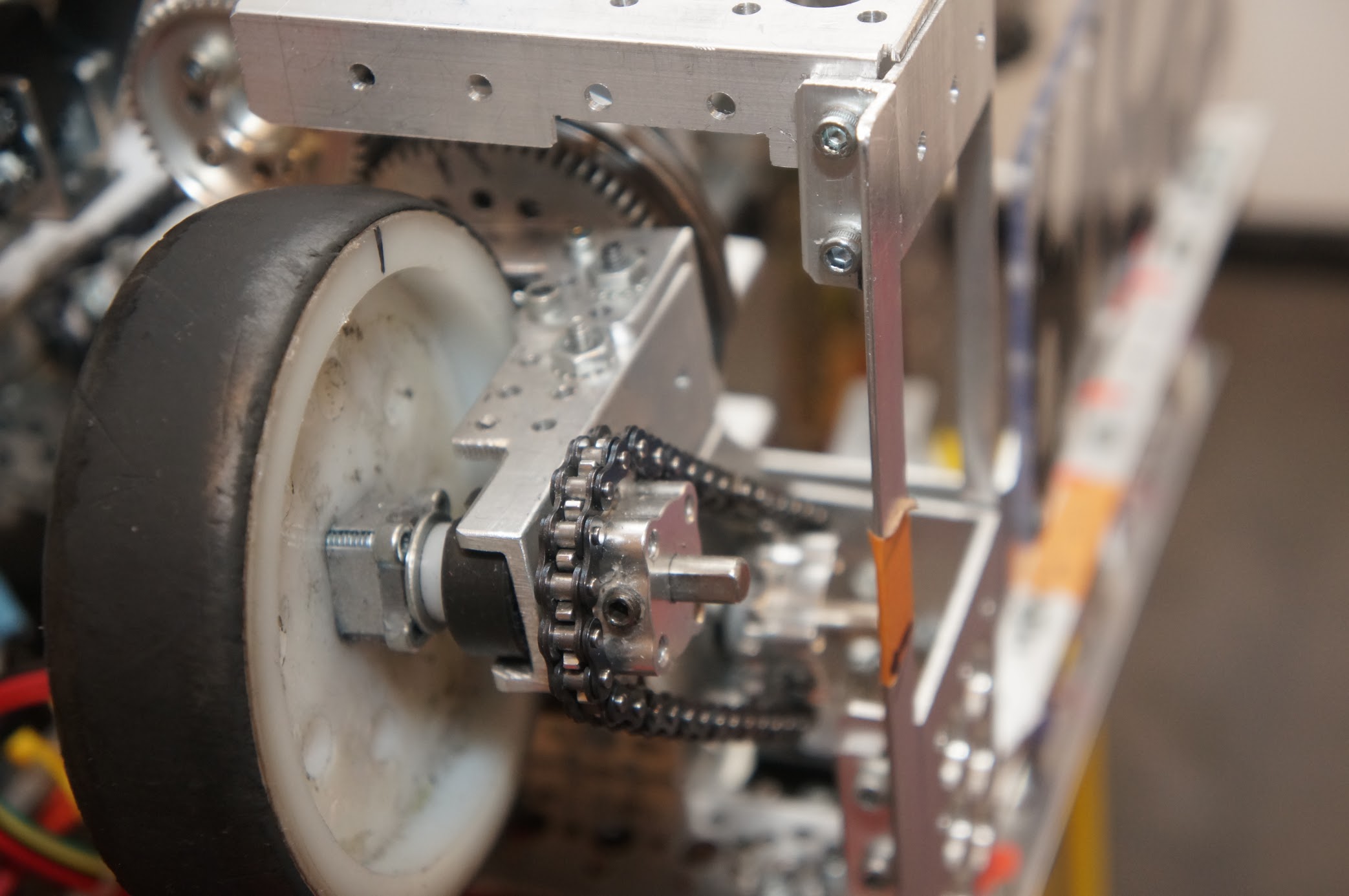
Swerve Drive
Meet BLACK WIDOW
This was our initial approach to Relic Recovery. We chose to go for the claw design because it would be much more accurate for our Autonomous, especially with the Swerve Drive.
We used our improved version of Hot Wired’s Swerve Drive that we call Swerve v2. It features NeveRest 20 Orbital Motors on the pod itself, which calls for an extremely compact pod. We had a dual motor lift to ensure both sides could lift our claw, which was powered by a four-bar linkage and two REV Servos. This provided us for a circular motion that would push aside other glyphs while gripping extremely accurately.
Since this robot was built during our League Meet staged, we had chosen not to focus on a Relic arm – rather, we focused on prototyping our new robot: El Tigre. Jewel Probe